Sintonización de Controladores PID
Ziegler y Nichols – Lazo Abierto
Este método de Ziegler Nichols se realiza con el sistema en lazo abierto, donde el controlador se coloca en modo manual para poder generar una variación del tipo escalón en la propia salida del controlador PID.

Esto quiere decir que la planta, en su entrada recibirá una entrada del tipo escalón (generalmente escalón unitario) y a partir de la respuesta de salida se obtienen los parámetros del PID. Este es el metodo de la curva de reaccion de ziegler-nichols.
Sin embargo, para poder usar este método es necesario que el sistema tenga un comportamiento del tipo sigmoidal o forma de S, esto quiere decir que la respuesta no puede tener sobre impulsos en lazo abierto, ni poseer una dinámica integradora que crezca constantemente con el tiempo.

La curva S esta definida por 2 constantes. Por el retardo en el tiempo L y por la constante de tiempo t , es decir viene dado por un sistema de primer orden con retardo, cuya función de transferencia es:
Por lo tanto podemos obtener los parámetros del sistema de primer orden con retardo de la siguiente forma: El retardo y la constante de tiempo se obtiene dibujando la tangente en el punto de inflexión de la curva sigmoidal y determinar las intersecciones de la línea tangente con el eje del tiempo y el eje donde c(t) = K como se muestra en la siguiente figura:


La respuesta anterior, también puede ser obtenida aproximando a un sistema de segundo orden sobreamortiguado a dinámicas semejantes a un sistema de primer orden.
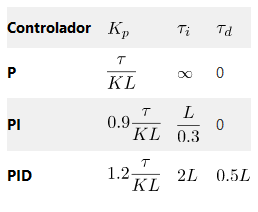
De esa forma Ziegler y Nichols sugirieron un ajuste PID estableciendo los valores de , y de acuerdo con la siguiente tabla de Ziegler y Nichols: